- Author:
- Rickard Green <rickard(at)erlang(dot)org>
- Status:
- Final/28.0 Implemented in OTP release 28
- Type:
- Standards Track
- Created:
- 07-Jan-2025
- Erlang-Version:
- OTP-28.0
- Post-History:
- https://erlangforums.com/t/eep-76-priority-messages
EEP 76: Priority Messages #
Abstract #
In some scenarios it is important to propagate certain information to a process quickly without the receiving process having to search the whole message queue which can become very inefficient if the message queue is long. This EEP introduces the concept of priority messages to the language which aim to solve this issue.
Motivation #
Asynchronous signaling is the Erlang way of communicating between processes.
The message signal is the most common type of signal. When a message signal is
received, it is added to the end of the message queue of the receiving process.
As a result of this, the messages in the message queue will be ordered in
reception order. When the receiving process fetch a message from the message
queue, using the receive expression, it begins searching at the start of the
message queue. Searching for a matching message is an O(N) operation where
N equals the amount of messages preceding the matching message.
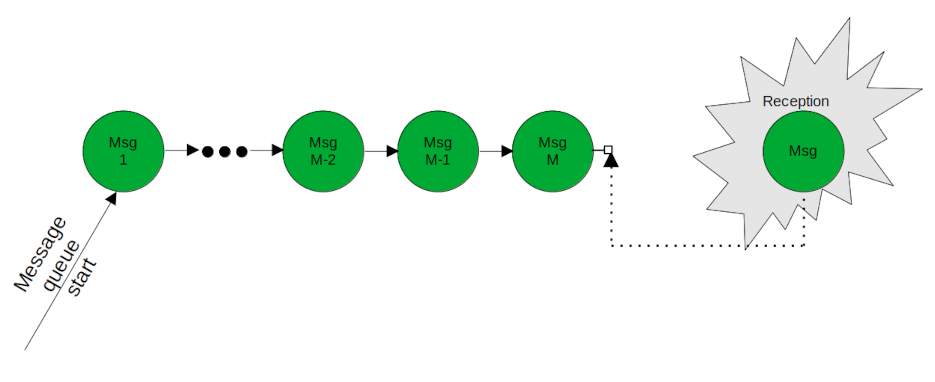
Figure 1.
This works great in most cases, but in certain scenarios it does not work at all. At least not without paying a huge performance penalty.
A Couple of Problematic Scenarios #
Long Message Queue Notification #
As of Erlang/OTP 27.0 it is possible to set up a system monitor monitoring the message queue lengths of processes in the system. When a message queue length exceeds a certain limit, you might want to change strategy of handling incoming messages. In order to do that, you typically need to inform the process with a long message queue about this.
Sending it a message informing about the long message queue will not work, since this message will end up at the end of the long message queue. If the receiver handles messages one at a time in message queue order, it will take a long time until the receiver fetch this message. The situation will at this point very likely have become even worse.
If the receiver instead periodically tries to search for such messages using
a selective receive, it will periodically have to do a lot of work. This
especially when the message queue is long. Polling the message queue length
using process_info/2 will in this case be a better workaround. That is,
communicating this information between processes using asynchronous signaling
does not work in this scenario, or at least work very poorly.
Prioritized Termination #
Prioritized termination is another scenario that has similar issues. A worker
process that handles large jobs is supervised in a supervision tree. It is easy
to envision that such a worker could get a large amount of requests in its
message queue. If the supervisor dies or wants the worker to terminate, the
worker will receive an exit signal from its supervisor. If the worker traps
exits, the corresponding 'EXIT' message will end up at the end of the message
queue.
If one wants to be able to terminate the worker prior to having to handle all
other requests in the message queue, one either has to stop trapping exits or
periodically do selective receives searching for such 'EXIT' messages. Not
trapping exits might not be an option and doing periodical selective receives
will be very expensive if the message queue is long. Pull request 8371
aimed to solve this scenario.
A workaround in this scenario could be to poll the supervisor using the
is_process_alive/1 BIF in combination with polling of an ETS table where the
supervisor can order it to terminate. That is, this is another scenario in
which communicating information between processes using asynchronous signaling
either does not work or performs very poorly.
Polling Workarounds #
In order to be able to solve scenarios like these without the risk of having to do a lot of work in the receiving process, one have to resort to passing the information other ways and let the receiver poll for that information. For example, write something into an ETS table and let the receiver poll that ETS table for information. This will prevent potentially very large costs of having to repeatedly do selective receives, but the polling will not be for free either.
In order to be able to handle scenarios like the ones above using asynchronous signaling, which is the Erlang way to communicate between processes, the following mechanism for sending and receiving priority messages between processes is proposed.
Rationale #
By letting certain messages get priority status and upon reception of such messages insert them before ordinary messages in the message queue we can handle scenarios like the above with very little overhead. Besides getting a solution that most likely will have less overhead than any workaround for communicating information like this, we also get a solution where asynchronous signaling between processes can still be used.
The proposed handling of priority messages in the message queue:
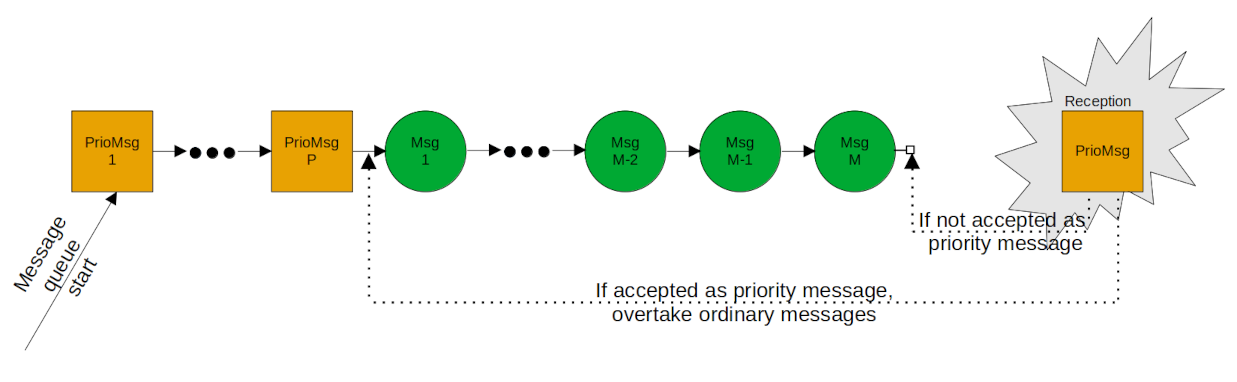
Figure 2.
There will be no way for the Erlang code to distinguishing a priority message from an ordinary message when fetching a message from the message queue. Such knowledge needs to be part of the message protocol that the process should adhere to.
The total message queue length in figure 2 equals P+M. The lengths P and
M will not be visible. The only visible length is the total message queue
length.
A receive expression will select the first message, from the start, in the
message queue that matches, just as before.
How to Insert Priority Messages in the Message Queue? #
By letting priority messages overtake ordinary messages that already exist in the message queue we get priority messages ordered in reception order among priority messages followed by ordinary messages ordered in reception order among ordinary messages. Instead of just overtaking ordinary messages, one could choose to let a priority message overtake all messages in the message queue regardless of whether they are priority messages or not, but then multiple priority messages would accumulate in reverse order. Having these two sets of messages ordered internally by reception order at least to me feels the most useful. Just as in the case of ordinary messages we will probably want to handle priority messages in reception order.
Note that the reception order of signals is not changed. If a process sends an ordinary message and then a priority message to a another process, the ordinary message will be received first and then the priority message will be received. The only difference is that when the priority message is received, it will be inserted earlier in the message queue than the ordinary message. That is, the signal ordering guarantee of the language will still be respected. This just modifies how the message queue is managed.
How to Determine What Should be a Priority Message? #
By introducing priority messages, the messages in the queue will not necessarily be in the order the corresponding signals were received. There will be a lot of code that assumes that the order of messages in the message queue is in reception order, so it is reasonable that one should need to opt-in in order to be able to receive priority messages.
This EEP propose that selected priority marked messages, selected exit messages, and selected monitor messages should be treated as priority messages. Perhaps one would want other types of messages to be treated as priority messages as well, but the set of allowed priority messages can easily be extended in the future if that should be the case.
Priority Aliases #
The way you opt-in for allowing other processes to send you priority messages
consists of two steps. First you create a process alias, by calling the
alias/1 BIF, and pass it the priority option in the option list. Such an
alias is from here on known as a priority process alias or shorter a
priority alias. When you have created the priority alias, you distribute the
alias to other processes that are to be able to send you priority messages.
The distribution may possibly be made via other processes.
The way of opting in by creating and distributing priority aliases to other processes that should be able to send you priority messages, is more or less the same way as you opt-in for allowing other processes to send you ordinary messages. When it comes to ordinary messages, you opt-in by distributing your process identifier to the processes that should be able to send you messages. The implementer of a program creating priority aliases determine how limited the possibility of sending priority messages should be by distributing the priority aliases to a smaller or larger set of processes. That is, the implementer can prevent abuse of priority messages by other parts of the software by limiting how priority aliases are distributed.
A process that has access to the priority alias can send a priority message, to
the process that created the alias, using the erlang:send/3 BIF by passing
the priority alias as first argument and the option priority in the option
list as third argument. The creator of the priority alias can deactivate it, for
example, by calling the unalias/1 BIF with the priority alias as argument.
By requiring that the sender pass a priority alias created as well as
passing the priority option to the erlang:send/3 BIF in order for the
message to be handled as a priority message, the process alias can also be used
for passing messages with normal priority. This will in some scenarios remove
the need for distributing both a process alias and a process identifier. In
order to simplify such scenarios one probably want to have the ability to
monitor active process aliases using the monitor() BIF. This is however left
as a future extension, since it is not needed for a lot of scenarios.
Similar to explicitly sending a priority message, a priority exit signal can
be sent using a priority alias and the new exit/3 BIF where the third
argument is an option list where the priority option can be passed. If the
empty list is passed as third argument and a process identifier is passed as
first argument, the exit/3 BIF it behaves as the exit/2 BIF of behaves
today.
Signals Triggered on Special Events #
An exit signal sent due to a broken link cannot be marked as a priority exit
signal using a priority alias since it is not sent by another process calling
a function like send/3 or exit/3. Instead the receiver of a priority exit
signal due to a broken link needs to mark that it wants the exit signal to be
handled as a priority exit signal by passing the priority option in an option
list as second argument to the new link/2 BIF. The link will be set up and
be handled as today with the exception that the process that called the
link/2 BIF with the priority option will receive a priority exit signal
if the link is broken.
If a link already exists when the link/2 BIF with the priority option is
called, the link remains but will be marked for priority handling. If a link
which has been marked for priority handling already exists when the link/2
BIF without the priority option or the link/1 BIF is called, the link will
remain, but the priority handling will be disabled.
Note that priority exit signals will not have any other behavior than today unless the receiver is trapping exits. This since the priority messages only affects how messages are moved into the message queue after a signal has been received. If the receiver is not trapping exits, no message will be moved into the message queue.
Similar to an exit signal sent due to a broken link, a monitor message is
triggered at some event occurring in the system and there is no function called
by the sender in order to send the signal. That is, it is not possible to use
priority aliases in order to control such priority handling. The receiver of
a priority monitor message needs to mark that it wants the monitor message as
a priority message by passing the new priority option in the option list to
the monitor/3 BIF.
It is intentionally not possible to select all exit and monitor messages as
priority messages. This since that would easily introduce bugs when code in
other modules are called from the process accepting priority messages. For
example, if a process enables all monitor messages as priority messages and
then makes a call into a module that makes a gen_server call, a 'DOWN'
message due to the call could be selected even though a reply message due to
the call had been delivered before the 'DOWN' message. In this case, the call
operation would fail even though it actually succeeded. The reply message would
then also be left as garbage in the message queue without any code picking it
up.
Reception of a Priority Message #
At signal reception, the receiver checks whether or not the signal should be
accepted as a message to move into the message queue or if another action
should be taken, for example, silently drop the signal. If accepted as a
message to move into the message queue and also accepted as a priority message,
the priority message will overtake all ordinary messages in the message queue
and will be inserted after the last accepted priority message in the queue;
otherwise, if not accepted as a priority message, it will be treated as an
ordinary message and will be inserted at the end of the message queue. See
figure 2. Once a message has been inserted into the message queue, it will not
be moved in the message queue. The only operations that can affect its place in
the message queue is removal of messages due to execution of the receive
expression and insertion of new messages due to incoming signals.
All information needed in order to determine whether or not a message should be handled as a priority message is readily available in the local state of the receiving process and can be checked with negligible cost. In the case of a message or exit signal sent using a alias, the receiver checks that the alias is marked as a priority alias and still active. In case of other exit signals transformed into messages this is marked in the process local link information, and in case of a monitor message this is marked in the process local monitor information.
The Selective Receive Optimization #
Current Erlang runtime system has a selective receive optimization that can
prevent the need to search large parts of the message queue for a matching
message. It is triggered when a reference is created and then matched against
in all clauses of a receive expression. Messages present in the message queue
when the reference is created do not have to be inspected, since they cannot
contain the reference.
When the optimization is triggered a marker is inserted into the message queue
and only messages after the marker are searched. This optimization can make a
huge impact on performance if the process has a long message queue. This
optimization is frequently used in OTP code such as, for example, in a
gen_server call.
The insertion of a priority message in the message queue clashes with the receive optimization since a reference now can appear earlier in the message queue than where the receive marker was inserted. One solution to this problem could be to disable the selective receive optimization on processes that enables priority messages. The user of priority messages would in that case have to be very careful not to call into modules that might rely on the selective receive optimization. This would more or less make it impossible to safely call modules that you don’t have full control over yourself, since it in the future might be modified in a way so that it relies on the selective receive optimization taking effect. Therefore I find it unacceptable to disable the selective receive optimization. The priority message implementation must preserve the selective receive optimization.
Distributed Erlang #
Handling of priority messages should be completely distribution transparent. You should be able to send and receive priority messages between nodes the same way as done locally.
Alternative Solutions Considered #
A separate priority message queue per process exposed to the Erlang program could be an alternative solution. You would need a way similar to this proposal to choose which messages should be accepted as priority messages. There would also need to be some new syntax in order to multiplex matching of messages from the different message queues. This would be a larger change of the language without providing any extra benefits as I see it. In order to use such a change one would also need to modify the APIs of all generic behaviors which would be a large change.
There have been suggestions for multiple priority levels similar to the process
priority levels. This could be viewed as an extension to this proposal. The
implementation could relatively easily be extended with multiple priority
levels even though it would complicate the implementation. A low priority
level similar to the process priority level low which is mixed with the
normal process priority level would be very strange to introduce, though.
This since there would not be any easy way of understanding which message will
be fetched from the message queue at a specific message queue state. I think
multiple priority levels should be left for the future if a good enough use
case is presented.
After the first publication of this EEP, two alternate solutions have been proposed in the forum thread about this EEP. Firstly the use of match specifications in order to index the message queue, and secondly the use of tagged tuples in order to determine if a message is a priority message. They are similar since in both cases an inspection of each message is needed. This is also my main objection to both of these approaches. This will put even more work onto processes that are already having trouble keeping up with messages passed to them. This more or less defeats the purpose of this feature. An optimization proposed is to move the work of inspecting messages from the receiver to the sender. This would, however, introduce synchronization needs between the sender and the receiver which would be especially problematic for the distributed scenario.
Backwards Compatibility #
Since the receiver process needs to opt-in in order to get any special handling of priority messages, this will be completely backwards compatible.
Summary #
The proposed solution for priority messages enables users to solve problems using asynchronous signaling, which is the Erlang way of communicating, where they previously had to resort to workarounds using polling of some sort. It is likely to reduce the performance impact in most, if not all, scenarios where one otherwise needs to resort to polling of some sort. Since you need to opt-in to this new behavior it is completely backwards compatible. The changes to the language are very small, just “a light touch”. On the conceptual level, it is very easy to understand how the priority messaging works assuming that you understand how asynchronous signaling in the language work.
Reference Implementation #
The reference implementation can be found in pull request 9269 of the Erlang/OTP repository.
Care has been taken to have as small impact on performance and memory as possible especially for processes not using priority messages.
A Few Notes on the Implementation #
The Message Queue #
The message queue may contain messages as well as receive markers used by the selective receive optimization. Receive markers are currently also used for adjustments that needs to be done to the message queue during certain operations. That is, the current code traversing the message queue needs to be prepared to encounter receive markers of different types.
When the user enables reception of priority messages, a block containing two receive markers and an area for auxiliary data is allocated. The receive markers in this memory block are of new types distinguishable from the already existing receive markers. All memory allocated for handling of priority messages is referred to from this memory block.
This memory block for priority message reception is referred to from process specific data. Process specific data is only used by processes that enable functionality that seldom is used. Since the memory used for priority message reception is referred to from process specific data, memory usage will only increase for processes using process specific data. If such processes have not enabled priority message reception, only one machine word more of data will be used.
While no priority messages exist in the message queue, handling of messages is done exactly the same way for a process that has enabled priority message reception as for a process that has not. When a priority message is accepted into the message queue, a priority message end marker is inserted at the start of the message queue and then the priority message is inserted just before the marker. If yet another priority message is accepted while the first priority message still is in the queue, it will be inserted just before the priority message end marker. The priority message end marker will remain in the message queue until no priority messages exist in the queue. At that point, the priority message end marker will be removed form the queue.
The second marker is inserted in the message queue when we need to remember a place in the message queue. This is needed when a priority message is accepted while we currently are traversing the message queue.
Receive Optimization #
If we have active receive markers for the selective receive optimization in the
message queue and a priority message is accepted, we scan the message for
references. If a reference corresponding to a receive marker is found, we mark
in the receive marker that the reference has been seen in the part of the
message queue containing priority messages. When we enter a receive
expression where a receive marker is used and it has been marked in the
receive marker that the reference has been seen in a priority message, we
search the priority messages prior to continuing with the messages after the
receive marker.
A further optimization that could be done to the receive optimization is to insert yet another receive marker before the first priority message containing the reference, but I see that as a premature optimization. A process is not expected to accumulate a large amount of priority messages. If so, the process has used priority messages in a way not intended.
Determining if a Message Should be Accepted as a Priority Message #
We more or less have two scenarios. In the first scenario, the signal was sent
by calling the erlang:send/3 BIF or the erlang:exit/3 BIF using a priority
alias and the priority option. In the second scenario, the signal was sent
due to a link being broken or a monitor being triggered where the link or
monitor was set up by calling the link/2 BIF or the monitor/3 BIF with the
priority option.
We first look at the first scenario. The receiver already has local information
about all active aliases for itself. When an alias message is received, it
looks up the local information about the alias. If the alias has been created
using the priority option, a priority bit is set in the local information
about the alias. A signal which has been sent using the priority option also
contains a bit set indicating that the priority option was used. In order to
determine whether or not to accept a signal as a priority message, the receiver
only needs to check that both of these priority bits are set.
When it comes to the second scenario. If an exit signal due to a broken link
or a monitor signal due to a triggered monitor should be handled as a priority
message, the link should have been set up by the link/2 BIF using the
priority option or the monitor should have been set up by the monitor/3
BIF using the priority option. In both cases, a priority bit will be set in
the local information about the link or monitor. When such a signal is
received, the receiver only needs to check if the priority bit is set in the
local data in order to determine if it should be accepted as a priority
message or not.
In both scenarios, the receiving process has local data associated with the
signal that it already needs to look up unrelated to priority messages. The
only extra work due to priority messages that it needs to do is to check if
the priority bit is set in this local data, and for signals sent using the
erlang:send/3 or erlang:exit/3 BIFs also check if the priority bit is set
in the signal. In other words, the operation of determining whether or not a
message should be accepted as a priority message is extremely cheap.
Priority Messages in Transit #
There exists a number of different types of signals. For each type of signal an action is taken when the signal is received. Ordinary messages are special since they are very common and the only action taken upon reception of an ordinary message is to add it to the end of the message queue. Due to this, the signal queue for incoming signals is arranged as a skip list where each non-ordinary message signal points to the next non-ordinary message signal. This way we can move a whole batch of ordinary messages into the message queue at once.
Priority marked message signals need to be sent as non-ordinary message signals, since they need to have another action taken than the default. There are other signals that are received as non-ordinary message signals, but then transformed into ordinary messages depending on the state of the receiving process. An example of such a signal is a message sent using an alias. Upon reception of such a message the receiver checks if the alias is still active. If it is, then adds it to the end of the message queue; otherwise, it drops the message. Since a message sent using an alias is very similar to a priority marked message, the implementation for alias messages has been generalized to handle alternate action messages. Both a priority marked message and a message sent using an alias are just messages with an alternate action to take upon reception than the default, so both of them will use the alternate action message implementation.
Change Log #
- 2025-01-22: The
process_flag/2flags for identifying messages to handle as priority messages were replaced by priority aliases and priority options. - 2025-02-22: Updated information on the reference implementation.
- 2025-02-22: Clarified how the
link()BIFs affects already existing links. - 2025-02-22: Changed the status of the EEP to final.
- 2025-02-25: Added info about the feature being implemented in OTP 28 in status.
Copyright #
This document is placed in the public domain or under the CC0-1.0-Universal license, whichever is more permissive.